
一位名为 Charles Diaz 的开发者使用树莓派创建了一个完全功能的 TARS 复制品。 这不仅仅是一个静态模型 – 它可以向前移动并在侧面转动。
Charles Diaz在过去两年中一直致力于创建一个电影中TARS机器人的迷你复制品,目标是使其像电影中的TARS一样行走。项目从一个功能但不可靠的概念验证模型发展到一个更加完善且高度可靠的原型。最新版本甚至配备了双机械臂,可以与周围环境互动。
视频播放器
使用了树莓派3B+作为主控,配备四个高扭矩金属齿轮伺服电机驱动腿部,Adafruit PCA-9685伺服驱动器控制伺服电机,电源使用两组8节NiMH电池,并通过5英寸HDMI显示器和8BitDo Zero 2蓝牙控制器进行控制。
- 基本行走:TARS V1 能够实现基本的行走动作。通过四个高扭矩金属齿轮伺服电机驱动两条腿的旋转和机身的上下移动,从而模拟TARS在电影中的步态。
- 步态控制:使用树莓派3B+作为主控,配合Adafruit PCA-9685伺服驱动器,通过编写的步态控制程序,实现对伺服电机的精准控制。
- 蓝牙遥控:TARS V1 配备8BitDo Zero 2蓝牙控制器,用户可以通过蓝牙远程控制TARS的行走和其他动作。
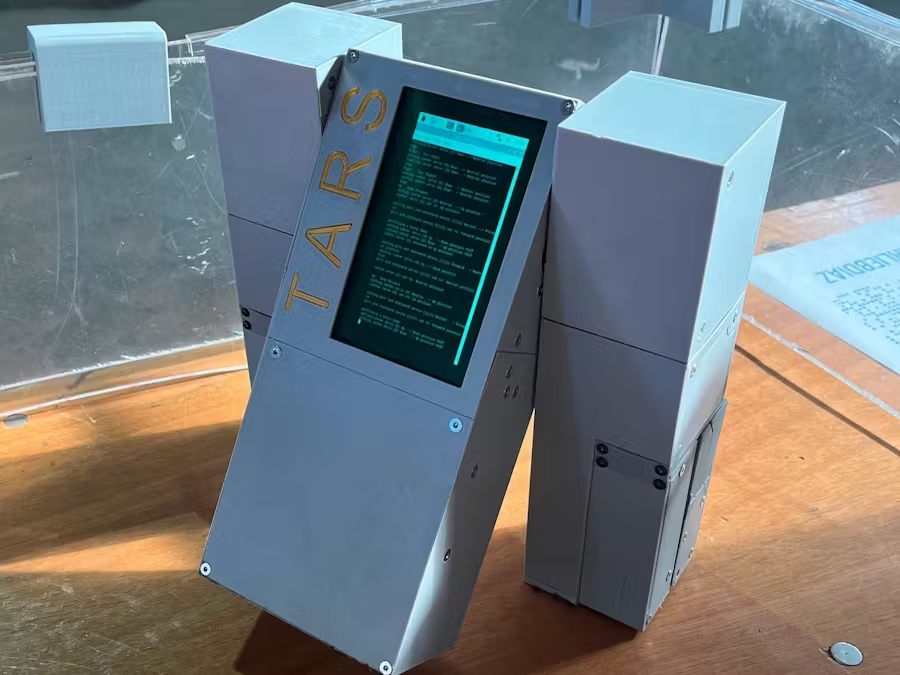
- 显示信息:5英寸HDMI显示器可以显示控制信息和状态,便于用户实时监控和操作TARS。
- 电池供电:TARS V1 使用两组8节NiMH电池组并联供电,为伺服电机和其他组件提供充足的电力支持。
- 主控电源:树莓派3B+通过5V USB手机充电器供电,确保系统稳定运行。
主要特点
- 高仿真度:尽可能还原了电影中TARS的外观和行走动作,使其具备较高的仿真度。
- 灵活性:模块化设计使得TARS V1 在结构上具备一定的灵活性,便于后续的改进和升级。
- 远程控制:通过蓝牙控制器,用户可以方便地远程操作TARS,实现更多互动功能。
Charles Diaz 将制作教程和硬件、代码都发布到了Hackster.io…

TARS V1 制作过程详细介绍
硬件组件
- 主控计算机:树莓派3B+,运行Raspbian操作系统
- 伺服电机:四个高扭矩金属齿轮伺服电机(均安装在机身内),分别控制两条腿的旋转和机身的上下移动
- 伺服驱动器:Adafruit PCA-9685 16通道PWM伺服驱动器
- 电源:两组8节(7.2V)NiMH电池组并联供电
- 显示器:5英寸HDMI显示器
- 遥控器:8BitDo Zero 2蓝牙控制器
机械结构设计
- 底盘:采用铝合金挤压成型的“脊柱”作为基础结构,安装了3D打印的聚碳酸酯零件,这些零件构成了TARS的整体驱动系统。
- 外壳:使用铝板作为外壳,顶部有聚碳酸酯屏幕保护罩,虽然铝材质不像电影中的钢材,但仍然给V1带来了一定的电影真实性。
- 电池及重量分布:所有的重型组件都安装在机身内部,电池重量过大导致步伐沉重,影响行走效果。
 详细制作过程介绍
详细制作过程介绍
1. 硬件组件准备
在开始制作之前,需要准备以下硬件组件:
- 树莓派3B+
- 高扭矩金属齿轮伺服电机(4个)
- Adafruit PCA-9685 16通道PWM伺服驱动器
- 8BitDo Zero 2蓝牙控制器
- 两组8节NiMH电池组
- 5英寸HDMI显示器
- 铝合金挤压成型材料和3D打印的聚碳酸酯零件
2. 底盘和机械结构组装
- 底盘设计与组装:
- 使用铝合金挤压成型的“脊柱”作为TARS的基础结构。铝合金材料确保了底盘的强度和稳定性。
- 通过3D打印技术制造聚碳酸酯零件,这些零件将安装在“脊柱”上,构成TARS的整体驱动系统。
- 安装伺服电机:
- 在TARS的机身内部安装四个高扭矩金属齿轮伺服电机。其中两个伺服电机用于控制两条腿的旋转,另外两个伺服电机用于控制机身的上下移动。
- 将伺服电机固定在铝合金结构上,确保其稳固性和准确性。
- 外壳和保护罩安装:
- 使用铝板作为TARS的外壳,为内部组件提供保护。
- 在顶部安装聚碳酸酯屏幕保护罩,保护显示器并增加整体的美观性。
3. 电源管理与连接
- 电池连接与布线:
- 将两组8节(7.2V)NiMH电池组并联供电,通过电线连接到伺服电机和其他组件。确保连接稳固,避免电源故障。
- 使用12V到6V DC降压转换器,确保伺服电机获得稳定的电源供应。
- 树莓派供电:
- 通过5V USB手机充电器为树莓派3B+供电,确保系统稳定运行。
4. 电子控制与编程
- 伺服驱动器连接:
- 将Adafruit PCA-9685伺服驱动器连接到树莓派3B+,用于控制伺服电机。确保驱动器与伺服电机和树莓派的连接正确。
- 显示器安装与连接:
- 安装5英寸HDMI显示器,并通过HDMI电缆连接到树莓派,显示控制信息和状态。
- 遥控器配置:
- 配置8BitDo Zero 2蓝牙控制器,使其能够与树莓派进行通信,远程控制TARS的行走和其他动作。
5. 软件开发与测试
- 树莓派系统配置:
- 在树莓派3B+上安装Raspbian操作系统,确保系统正常运行。
- 步态控制程序编写:
- 编写步态控制程序,通过Adafruit PCA-9685伺服驱动器控制伺服电机的旋转和移动。程序需要考虑步态的平稳性和准确性,确保TARS能够正常行走。
- 调试与优化:
- 通过多次测试,调整步态控制程序,优化伺服电机的动作。观察TARS的行走效果,记录问题并进行调整。
- 调整重量分布,尽量减少步伐的冲击力,避免3D打印的驱动组件损坏。
6. 最终测试与改进
- 综合测试:
- 对TARS进行全面的功能测试,确保所有组件和控制系统正常工作。
- 通过蓝牙控制器远程控制TARS,测试其行走和互动功能。
- 问题记录与改进:
- 记录测试过程中遇到的问题,分析原因并提出改进方案。
- 根据测试结果,对机械结构、电源管理和步态控制程序进行调整和优化。
- 迭代改进:
- 通过多次迭代,不断改进TARS的设计和功能。优化重量分布,改用轻便的LiPo电池,改进步态控制程序,提升TARS的稳定性和续航能力。

TARS V1 制作过程中遇到的问题与改进方案
1. 问题:重量分布不均
描述:由于使用了两组8节NiMH电池,导致整体重量较大,尤其是重型组件集中在机身内部,使得TARS V1在行走时步伐沉重,影响了行走的平稳性和稳定性。
改进方案:
- 改用轻便电池:替换NiMH电池,使用容量相当但更轻便的LiPo电池。LiPo电池重量更轻,能量密度更高,有助于减轻整体重量,提升续航能力。
- 优化重量分布:重新设计内部组件的布局,使重量更均匀地分布在整个机器人结构中,避免重心过高或过于集中在某一部位。
2. 问题:步态控制程序不完善
描述:初始步态控制程序导致TARS V1的步伐沉重且暴力,造成3D打印的驱动组件频繁损坏,影响了机器人的稳定性和耐用性。
改进方案:
- 优化步态算法:深入研究步态控制算法,优化伺服电机的动作和协调性,确保每一步的力度和速度都得到合理控制,减少对组件的冲击力。
- 使用传感器反馈:在TARS V1上安装传感器(如加速度计和陀螺仪),实时监测机器人的姿态和运动状态,根据反馈调整步态程序,提高行走的稳定性。
3. 问题:电源管理不完善
描述:两组NiMH电池并联供电,虽然能够提供足够的电力,但由于电池类型和连接方式,导致供电不稳定,影响了机器人的连续运行。
改进方案:
- 改用稳定电源:改用LiPo电池,不仅能减轻重量,还能提供更稳定的电源供应。选用高质量的电池管理系统(BMS),确保电池使用的安全性和可靠性。
- 增加电源冗余:设计双电源系统,确保在一组电池耗尽时,另一组电池可以无缝切换,保证机器人的连续运行。
4. 问题:机械结构的耐用性
描述:3D打印的聚碳酸酯零件在机器人行走时承受较大的冲击力,导致频繁损坏,影响了整体结构的耐用性和稳定性。
改进方案:
- 改进材料选择:选择更坚固耐用的材料替代部分3D打印件,如使用金属或高强度复合材料制造关键承力部件。
- 结构加强设计:在机械设计中增加加强筋和支撑结构,提高零件的抗冲击能力和耐用性。
5. 问题:蓝牙控制范围和稳定性
描述:使用8BitDo Zero 2蓝牙控制器在一定距离和障碍物条件下可能会出现信号不稳定或控制延迟的问题。
改进方案:
- 改进通信方式:考虑使用更稳定的无线通信方式,如WiFi或ZigBee,提升控制信号的范围和稳定性。
- 增加天线和信号放大器:在蓝牙模块上增加外置天线或信号放大器,提高通信距离和信号稳定性。
未来改进方向
- 改进步态控制程序:持续优化步态控制算法,引入机器学习技术,根据传感器反馈不断调整和优化步态,提高行走的智能化和适应性。
- 提升交互功能:增加机械臂和更多传感器,提升TARS与环境的交互能力,使其具备更多的功能和应用场景。
- 增强耐用性:在材料和结构设计上进一步优化,确保机器人在各种环境下都能稳定运行,延长使用寿命。
- 优化能源管理:引入太阳能电池或其他可再生能源解决方案,提升机器人的续航能力和环保性能。
原文以及CAD图纸零件代码获取:https://www.hackster.io/charlesdiaz/how-to-build-your-own-replica-of-tars-from-interstellar-224833#cad
新一代“问小智”AI人工智能,无限画板 + 无限创意 支持问小智系列模型、大社区模型、等多种模型 !科技向善让AI拥抱大众!